Remote Stepper Control:
For my IOT Esp32 Remote control assignment, I integrated it with my final project. To do so, I created an ESP32 webserver with buttons that allows me to remotely control stepper motors. Here's the code:
#include <AccelStepper.h>>
#include <WiFi.h>>
#include <WebServer.h>>
// Replace with your Wi-Fi credentials
#define WIFI_SSID "MAKERSPACE"
#define WIFI_PASSWORD "12345678"
// Define stepper configurations
#define NEMA8_CONFIG 1
#define STEPPER28BYJ_CONFIG 8
// Define GPIO pin numbers for Nema 8 steppers
#define NEMA8_STEP_PIN_1 14
#define NEMA8_DIR_PIN_1 27
#define NEMA8_STEP_PIN_2 26
#define NEMA8_DIR_PIN_2 25
#define NEMA8_STEP_PIN_3 33
#define NEMA8_DIR_PIN_3 32
#define NEMA8_STEP_PIN_4 35
#define NEMA8_DIR_PIN_4 34
// Define GPIO pin numbers for 28BYJ-48 stepper
#define STEPPER28BYJ_PIN1 19
#define STEPPER28BYJ_PIN2 21
#define STEPPER28BYJ_PIN3 22
#define STEPPER28BYJ_PIN4 23
// Create instances of AccelStepper for each stepper
AccelStepper nema8Stepper1(NEMA8_CONFIG, NEMA8_STEP_PIN_1, NEMA8_DIR_PIN_1);
AccelStepper nema8Stepper2(NEMA8_CONFIG, NEMA8_STEP_PIN_2, NEMA8_DIR_PIN_2);
AccelStepper nema8Stepper3(NEMA8_CONFIG, NEMA8_STEP_PIN_3, NEMA8_DIR_PIN_3);
AccelStepper nema8Stepper4(NEMA8_CONFIG, NEMA8_STEP_PIN_4, NEMA8_DIR_PIN_4);
AccelStepper stepper28BYJ(STEPPER28BYJ_CONFIG, STEPPER28BYJ_PIN1, STEPPER28BYJ_PIN3, STEPPER28BYJ_PIN2, STEPPER28BYJ_PIN4);
// Define structure to store stepper positions for each pose
struct Pose {
long nema8Pos1;
long nema8Pos2;
long nema8Pos3;
long nema8Pos4;
long stepper28BYJPos;
};
// Define predefined poses
Pose pose1 = {1000, 2000, 3000, 4000, 5120}; // Example positions for each motor
Pose pose2 = {500, 1500, 2500, 3500, 2560}; // Example positions for another pose
// Create a WebServer instance
WebServer server(80);
// Function to move all steppers to a specific pose
void moveToPose(Pose targetPose) {
nema8Stepper1.moveTo(targetPose.nema8Pos1);
nema8Stepper2.moveTo(targetPose.nema8Pos2);
nema8Stepper3.moveTo(targetPose.nema8Pos3);
nema8Stepper4.moveTo(targetPose.nema8Pos4);
stepper28BYJ.moveTo(targetPose.stepper28BYJPos);
}
// Function to run all steppers to a specific pose
void runToPose(Pose targetPose) {
moveToPose(targetPose);
while (nema8Stepper1.isRunning() || nema8Stepper2.isRunning() || nema8Stepper3.isRunning() || nema8Stepper4.isRunning() || stepper28BYJ.isRunning()) {
nema8Stepper1.run();
nema8Stepper2.run();
nema8Stepper3.run();
nema8Stepper4.run();
stepper28BYJ.run();
}
}
void setup() {
// Start Serial communication
Serial.begin(115200);
// Connect to Wi-Fi
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.println("Connecting to WiFi...");
}
Serial.println("Connected to WiFi");
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
// Set up web server routes
server.on("/", handleRoot);
server.on("/runPose", handleRunPose);
server.begin();
// Set maximum speed and acceleration for Nema 8 steppers
nema8Stepper1.setMaxSpeed(1000);
nema8Stepper2.setMaxSpeed(1000);
nema8Stepper3.setMaxSpeed(1000);
nema8Stepper4.setMaxSpeed(1000);
nema8Stepper1.setAcceleration(500);
nema8Stepper2.setAcceleration(500);
nema8Stepper3.setAcceleration(500);
nema8Stepper4.setAcceleration(500);
// Set maximum speed and acceleration for 28BYJ-48 stepper
stepper28BYJ.setMaxSpeed(500);
stepper28BYJ.setAcceleration(200);
}
void loop() {
// Handle incoming web requests
server.handleClient();
}
Fig. 9.1: Code used for remote control
Here is the circuit I used with the ESP32. Wires up top lead to steppers, two wires on the left lead to 12v power.
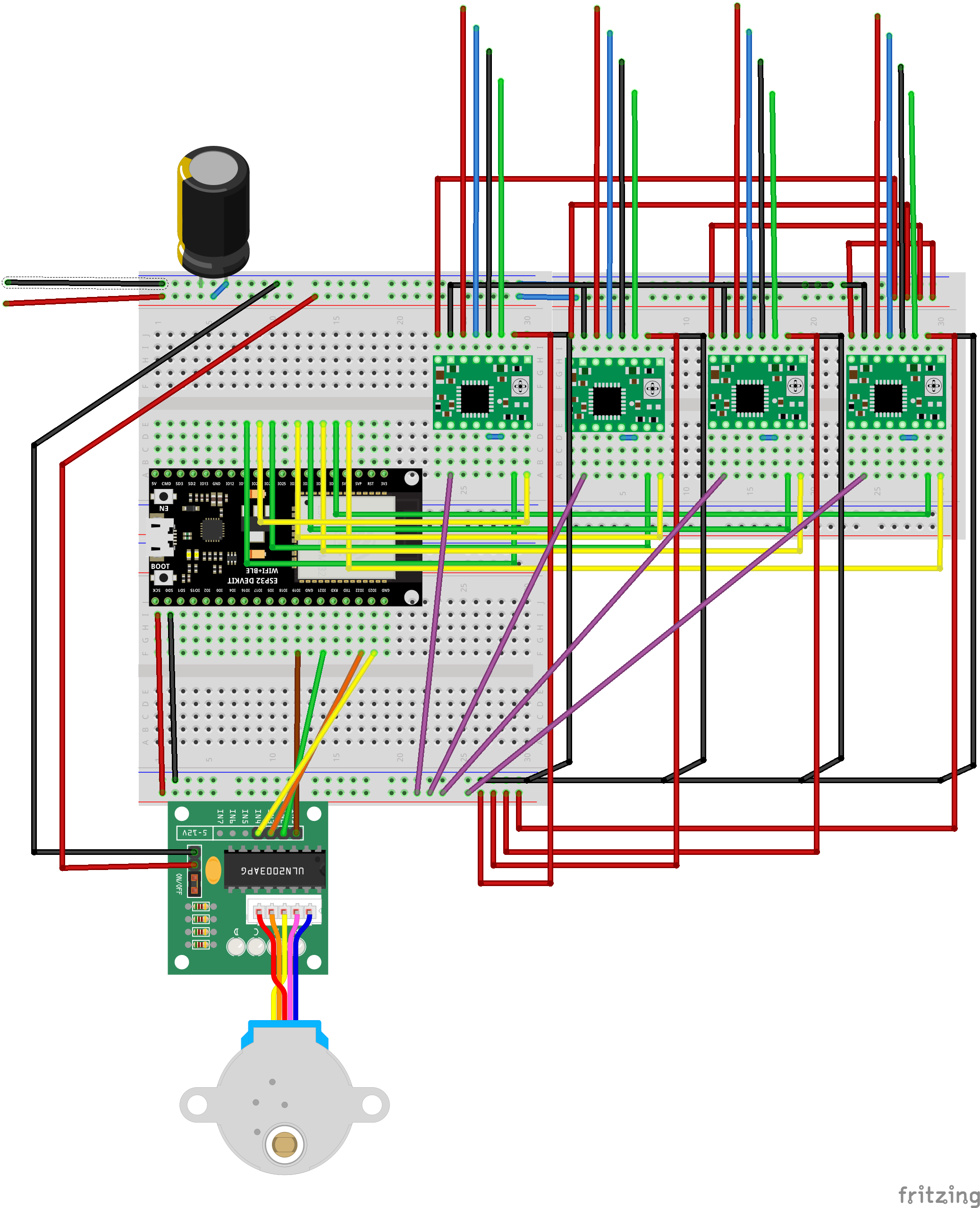
Fig 9.2: Circuitry used for controlling steppers
To see this remote control device in action, watch this video of my final project: